حرکت گلهای و هوشمند نانوروباتها میتواند کارایی آنها را افزایش دهد
به گزارش گروه دانشگاه خبرگزاری دانشجو، محققان نشان دادند که میتوان روباتها را به گونهای توسعه دهند که رفتار هوشمند گلهای نظیر ماهیها یا زنبورها داشته باشند. چنین رفتار گلهای مدیریت روباتها را سادهتر کرده و با کمترین انرژی میتوان آنها را به هدف رساند. همچنین روباتها در برابر تهدیدها و چالشهای خارجی عکسالعمل بهتری خواهند داشت. رفتار گلهای نقش مهمی در اکوسیستمهای طبیعی دارد....
به گزارش گروه دانشگاه خبرگزاری دانشجو، محققان نشان دادند که میتوان روباتها را به گونهای توسعه دهند که رفتار هوشمند گلهای نظیر ماهیها یا زنبورها داشته باشند. چنین رفتار گلهای مدیریت روباتها را سادهتر کرده و با کمترین انرژی میتوان آنها را به هدف رساند. همچنین روباتها در برابر تهدیدها و چالشهای خارجی عکسالعمل بهتری خواهند داشت.
رفتار گلهای نقش مهمی در اکوسیستمهای طبیعی دارد. این نوع رفتار در ماهیها، مورچهها و زنبورها دیده میشود. چنین رفتار گلهای به یک کلونی اجازه میدهد تا نسبت به تهدیدهای خارجی پاسخ مناسب دهد.
این رفتار الهام بخش محققان دانشگاه تگزاس در آستین شد به طوری که آنها بیش از یک سال را صرف توسعه فناوری کرمهای هوشمند کردند که روباتهای میکروسکوپی هستند. محققان تعامل اجتماعی را میان این ماشینهای کوچک ایجاد کردند تا آنها بتوانند شبیه یک گروه هماهنگ عمل کنند. رفتار گلهای این روباتهای میکروسکوپی موجب شد تا آنها وظیفهای که به صورت انفرادی به سختی قابل انجام بود را به صورت گلهای به خوبی انجام دهند.
یوبینگ ژن از محققان این پروژه میگوید: «رفتار گلهای در پرندگان، ماهیها و دیگر موجودات موجب تمایل بیشتر به همکاری با دیگر اعضاء کلونی میشود. آنها در کنار هم آنها باهوشتر، قویتر و کارآمدتر میشوند. ما میخواستیم در مورد سازوکارهای این نوع رفتار اطلاعات بیشتری کسب کنیم و ببینیم آیا میتوانیم آن را در روباتها شبیهسازی کنیم.»
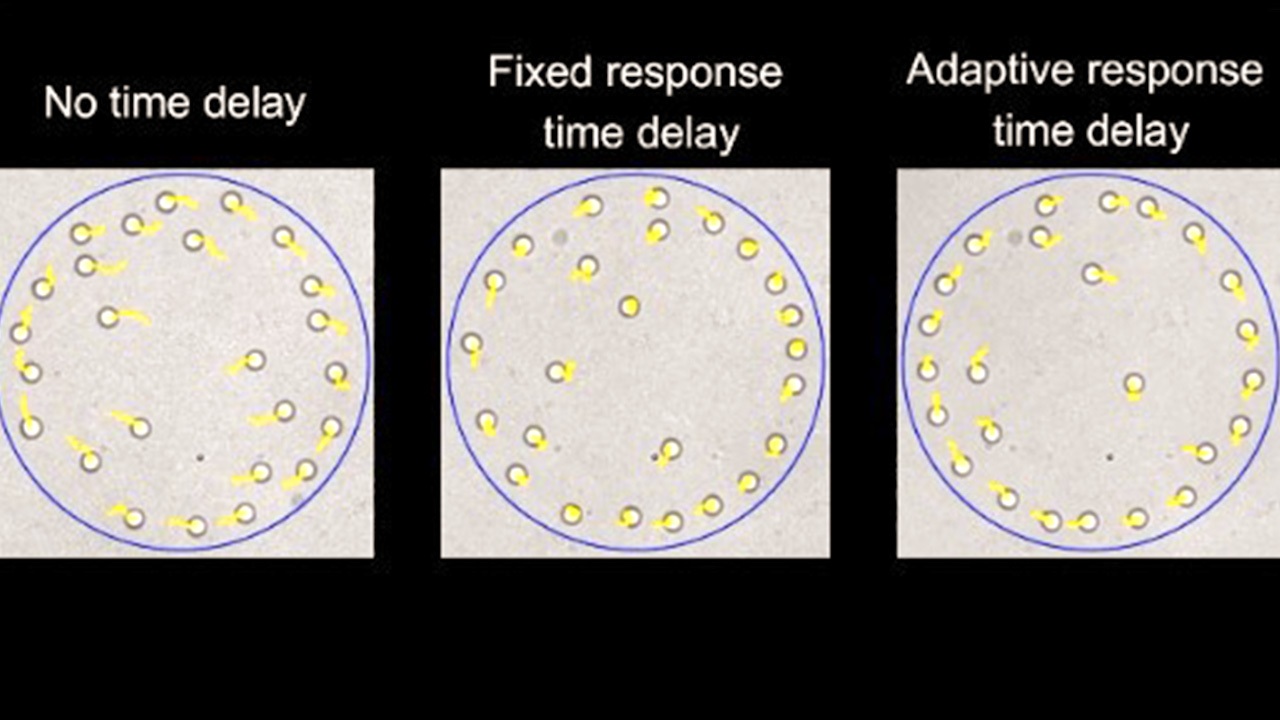
آنها در مقالهای که به تازگی در نشریه Advances Science منتشر شده است، قدمهای مثبتی در این مسیر برداشتند. در این مقاله محققان ویژگی جدیدی به نام تأخیر زمان تطبیقی (Adaptive Time Delay) را مطرح کردند. این مفهوم به هر روبات اجازه میدهد تا در یک گله حرکت خود را با تغییرات محیطی سازگار کند. با چنین کاری، کل گله روباتها میتواند بدون کاهش استحکام خود، افزایش انعطافپذیری در پاسخگویی از خود نشان دهد.
راهبرد تأخیر زمان تطبیقی پتانسیل امکان مقیاسپذیری و ادغام در سامانههای بزرگتر را فراهم میکند. این رویکرد میتواند به طور قابل توجهی کارایی عملیاتی ناوگان هواپیماهای بدون سرنشین را افزایش دهد. همچنین به همان روشی که ماهیها به صورت دستهای با هم حرکت میکنند، این فناوری میتواند انتقال رفت و آمد خودروها را در سفرهای بزرگراهی بهتر مدیریت کند. در چنین سیستمهایی نیاز به کنترل مرکز نبوده و کمترین انرژی برای مدیریت سیستم نیاز است.
نانوروباتها به صورت منفرد در محیطهای پیچیده آسیبپذیر هستند؛ روباتها لازم است تا به طور مؤثر در شرایط چالش برانگیز مانند جریان خون یا آبهای آلوده حرکت کنند. این حرکت جمعی میتواند به آنها کمک کند تا در یک محیط پیچیده بهتر حرکت کنند و به هدف برسند.