مدلی که به رباتها در جستجوی اشیا کمک میکند
پژوهشگران "دانشگاه میشیگان"، مدلی ابداع کردهاند که میتواند به رباتها کمک کند تا جستجوی اشیا را مانند انسانها انجام دهند.
به گزارش ایسنا و به نقل از تکاکسپلور، پژوهش جدیدی که در "دانشگاه میشیگان"(UMich) انجام شده است، نشان میدهد که رباتها میتوانند با درک ارتباط میان اشیای متفاوت خانه، یاد بگیرند که چگونه آنها را زودتر پیدا کنند. پژوهشگران در این پروژه، مدلی را ابداع کردهاند که یک راهبرد جستجوی بصری را به رباتها ارائه میدهد تا یاد بگیرند که چگونه اشیای گوناگون را جستجو کنند.
یکی از اهداف معمول متخصصان حوزه رباتیک این است که توانایی مسیریابی را در فضاهای واقعی برای رباتها فراهم کنند. این فضاها میتوانند با بینظمی همراه باشند و رباتها باید به جستجوی اشیای خاصی بپردازند که پیشتر هرگز آنها را ندیدهاند.
"ژن زنگ"(Zhen Zeng)، از پژوهشگران این پروژه گفت: داشتن توانایی جستجوی کارآمد در محیط اطراف، قابلیت مهمی برای رباتها به شمار میرود و به آنها در انجام دادن وظایف روزمره به صورت خودکار کمک میکند. ما یک روش عملی ابداع کردهایم که به رباتها کمک میکند تا اشیای مورد نظر را در یک محیط پیچیده پیدا کنند. خانهها معمولا با بینظمی کامل همراه نیستند زیرا ما چیدمان خانهها را براساس نظم خاصی انجام میدهیم و هر یک از وسایل خانه، جای مخصوصی دارند.
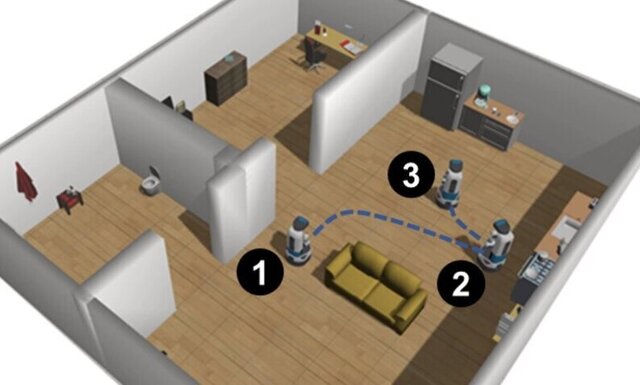
زنگ و پروفسور "چاد جنکینز"(Chad Jenkins)، مدلی موسوم به "اسلیم"(SLiM) را ارائه دادهاند که اشیای خاصی را در ذهن ربات با اشیای دیگر مرتبط میسازد و دادههایی را در مورد نحوه قرار گرفتن آنها ارائه میدهد.
ربات با کمک اسلیم میتواند به درک پیچیدهتری در مورد اشیای مورد نظر و نحوه قرار گرفتن آنها در محیط برسد. در مقاله این پژوهش آمده است: هنگامی که از انسانها پرسیده میشود که اشیای مورد نظر را کجا میتوان پیدا کرد، میتوانند فرضیاتی را براساس روابط مکانی اشیا فراهم کنند. رباتها نیز باید بتوانند استدلال مشابهی را در مورد اشیا داشته باشند. پژوهشهای پیشین، اشیا را ایستا فرض کردهاند و نشان میدهند که اشیا در جای خود باقی میمانند. ما برای غلبه بر این محدودیت، نوعی نمودار خاص را برای نشان دادن احتمالات و مدلسازی روابط میان اشیای گوناگون ارائه دادهاند. اسلیم با مدلسازی احتمالات، رباتها را برای جستجوی دقیق اشیای مورد نظر راهنمایی میکند.
انتهای پیام