ابداع انگشت رباتیک با کمک فناوری چاپ 3بعدی

یک گروه از پژوهشگران چین و ژاپن، نوعی انگشت رباتیک ارائه دادهاند که با کمک فناوری چاپ 3بعدی ابداع شده است.
به گزارش ایسنا و به نقل از تکاکسپلور، پژوهشگران "دانشگاه صنعتی ژجیانگ"(Zhejiang University of Technology)، "دانشگاه تیانجین"(TJU)، "دانشگاه فناوری نانجینگ"(NJTech) چین و "دانشگاه ریتسومیکان"(Rits) ژاپن، یک انگشت رباتیک نرم ابداع کردهاند که یک حسگر منحنی با استفاده از چاپ سهبعدی در آن تعبیه شده است. این انگشت رباتیک، از چندین ماده از جمله یک الکترود قابل کشش ساخته شده است.
"منجینگ ژی"(Mengying Xie)، از نویسندگان این پژوهش گفت: رباتهای نرم میتوانند مانند پلی روی شکاف میان ماشینها و انسانها باشند اما این موضوع مهم است که بتوانند تعامل ایمن میان انسان، اشیا و محیط را تضمین کنند. حسگرهای نرم میتوانند نقش مهمی در پیشرفت رباتهای نرم قابل کنترل داشته باشند و کارآیی آنها را افزایش دهند.
این گروه پژوهشی با الهام از پروژههای پیشین، یک انگشت نرم رباتیک مبتنی بر چاپ سهبعدی ابداع کردهاند که قابلیت حس کردن دارد.
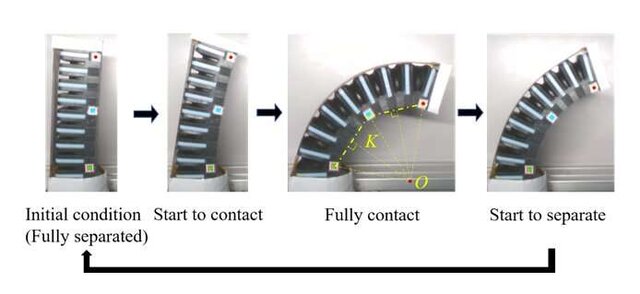
این انگشت رباتیک، به یک حسگر فشرده شامل یک الکترود مجهز است که میتواند انتهای ناشی از خم شدن انگشت را احساس کند و کار خود را بدون نیاز به منبع خارجی نیرو انجام دهد.
ژی ادامه داد: فرآیند ساخت یک حسگر پیچیده معمولا به زمان زیادی نیاز دارد و امکان تولید انبوه آن نیز با محدودیت همراه است. اتصال ناپایدار کابل و مونتاژ پیچیده سیستم میتواند به عملکرد ضعیف کل سیستم رباتیک منجر شود.
ژی و همکارانش، سیستم خود را با استفاده از فناوری چاپ سهبعدی ساختند؛ در نتیجه توانستند زمان لازم برای ساخت نمونه ابتدایی را به صورت قابل توجهی کاهش دهند.
حسگرهای تعبیه شده در این انگشت رباتیک میتوانند سیگنالهای مکانیکی را به صورت موثر، به سیگنالهای الکتریکی تبدیل کنند. این حسگرها در بررسیهای پیشین، نقش امیدوارکنندهای را به عنوان رابط میان ماشین و انسان به نمایش گذاشتند.
این پژوهش، امکان ابداع ساختارهای رباتیک را با فناوری چاپ سهبعدی نشان میدهد. شاید در آینده بتوان از این روش برای ساخت سیستمهای رباتیک دیگری استفاده کرد که قابلیتهای حسی پیشرفتهای دارند.
این پژوهش، در مجله "Elsevier's Nano Energy" به چاپ رسید.
انتهای پیام